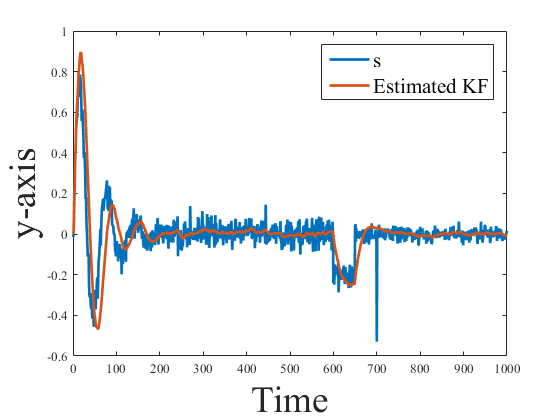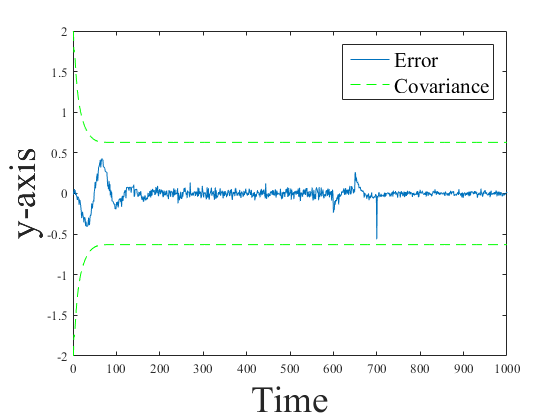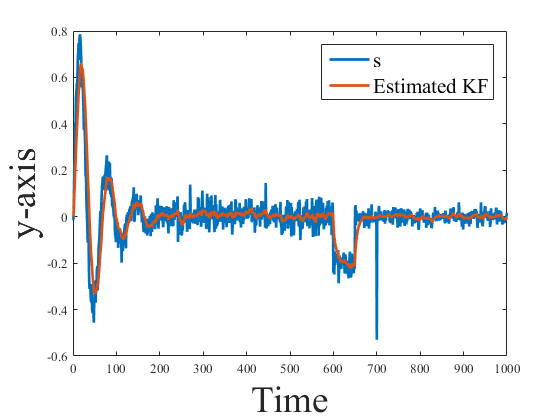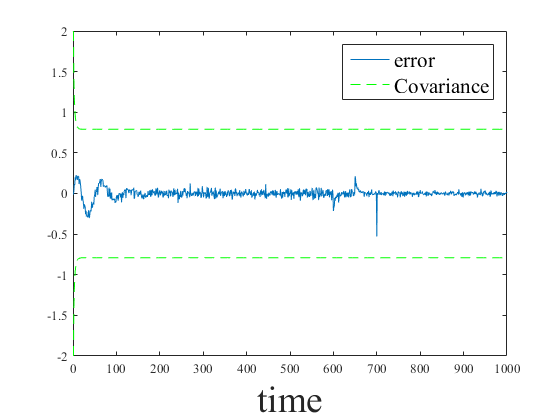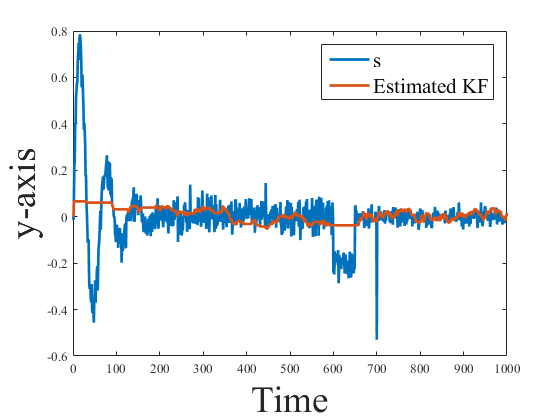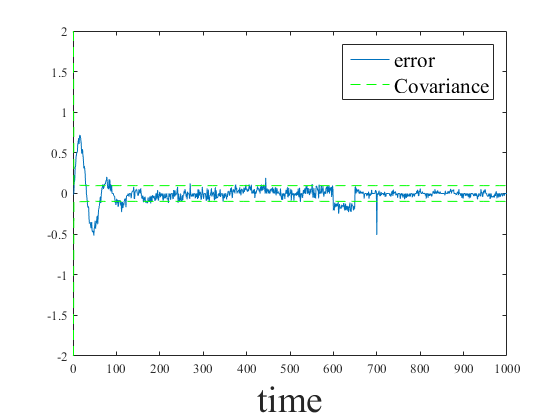
clear close all load('signal'); %Measurement noise Rvv=2.2^2; %Process noise Rww=[0 0;0 0.008]^2; %System Model A=[1 1; 0 1]; C=[1 0]; %Initialization P0 = diag([2^2 2^2]); MD_act=1; M_D_val=10; [x,K,P,M_D]= m_KF(A,C,P0,y_s1,Rww,Rvv,1,0.1); %Plot signal and filtered signal figure(1) p1=plot(y_s1,'LineWidth',2); hold on p2=plot(x(1,:),'LineWidth',2); legend([p1 p2],'x','x-est') ylabel('y-axis','FontSize', 28); xlabel('Time', 'FontSize',28); legend({'s','Estimated KF'},'FontSize',16) set(gca,'FontName','Times'); %Plot the error and the covariance figure(2) plot(y_s1-x(1,:)); hold on plot(sqrt(squeeze(P(1,1,:))),'--','Color','G'); plot(-sqrt(squeeze(P(1,1,:))),'--','Color','G'); ylabel('y-axis','FontSize', 28); xlabel('Time', 'FontSize',28); legend({'Error','Covariance'},'FontSize',16) set(gca,'FontName','Times');